Äîêóìåíòàöèÿ è îïèñàíèÿ www.docs.chipfind.ru
©2002 Fairchild Semiconductor Corporation
www.fairchildsemi.com
Rev. 1.0.2
Features
· 1-Phase, Full-Wave, Linear DC Motor Driver
· Built-in TSD (Thermal Shutdown) Circuit
· Built-in 5V Regulator (With An External PNP TR)
· Built-in Mute Circuit
· Built-in Loading Motor Speed Control Circuit
· Wide Operating Supply Voltage Range: 6V~13.2V
Description
The KA9259D is a monolithic integrated circuit, and
suitable for 5-CH motor driver which drives focus actuator,
tracking actuator, sled motor, spindle motor and loading
motor of CD system.
28-SSOPH-375
Typical Applications
· Compact Disk Player (CDP)
· Video Compact Disk Player (VCD)
· Automotive Compact Disk Player (CDP)
· Other Compact Disk Media
Ordering Information
Device
Package
Operating Temp.
KA9259ED
28-SSOPH-375
-25
°
C ~ +75
°
C
KA9259EDTF 28-SSOPH-375
-25
°
C ~ +75
°
C
KA9259D(KA9259ED)
5-Channel Motor Drive IC
KA9259D(KA9259ED)
2
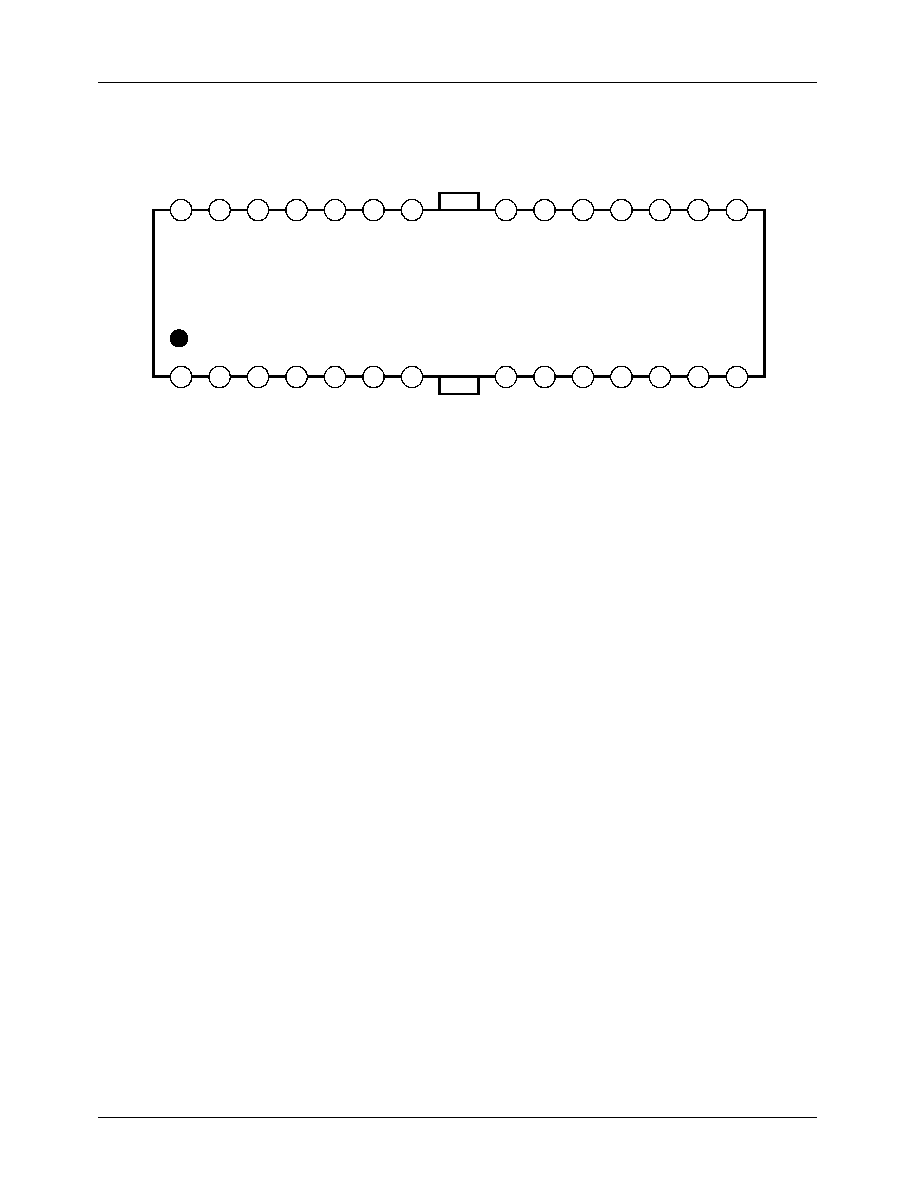
Pin Assignments
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
DO1
.
1
DO1
.
2
DI
1
.
1
DI
1
.
2
REB
REO
MUTE
GND1
DI
5
.
1
DI
2
DO2
.
1
DO2
.
2
GND2
DI
5
.
2
GND3
DO4.
2
DO4.
2
DI
4
.
2
DI
4
.
1
VREF
V
CC2
V
CC1
LD CTL
DI
3
DO3.
2
DO3.
1
DO5.
2
DO5.
1
FIN
(GND)
FIN
(GND)
KA9259D
KA9259D(KA9259ED)
3
Pin Definitions
Pin Number
Pin Name
I/O
Pin Function Description
1
DO1.1
O
Focus Output 1(-)
2
DO1.2
O
Focus Output 2(+)
3
DI1.1
I
Focus Input 1
4
DI1.2
I
Focus Input 2 (Adjustable)
5
REB
O
Regulator Base
6
REO
O
Regulator Output, 5V
7
MUTE
I
Mute
8
GND1
-
Ground 1
9
DI5.1
I
Loading Input 1
10
DI2
I
Spindle Input 2
11
DO2.1
O
Spindle Output (+)
12
DO2.2
O
Spindle Output (-)
13
GND2
-
Ground 2
14
DI5.2
I
Loading Input 2
15
DO5.1
O
Loading Output 1(+)
16
DO5.2
O
Loading Output 2(-)
17
DO3.1
O
Sled Output (-)
18
DO3.2
O
Sled Output (+)
19
DI3
I
Sled Input
20
LD CTL
I
Loading Motor Speed Control
21
V
CC1
-
Supply Voltage 1
22
V
CC2
-
Supply Voltage 2
23
VREF
I
2.5V Bias
24
DI4.1
I
Tracking Input 1 (Adjustable)
25
DI4.2
I
Tracking Input 2
26
DO4.1
O
Tracking Output 1(+)
27
DO4.2
O
Tracking Output 2(-)
28
GND3
-
Ground 3
KA9259D(KA9259ED)
4
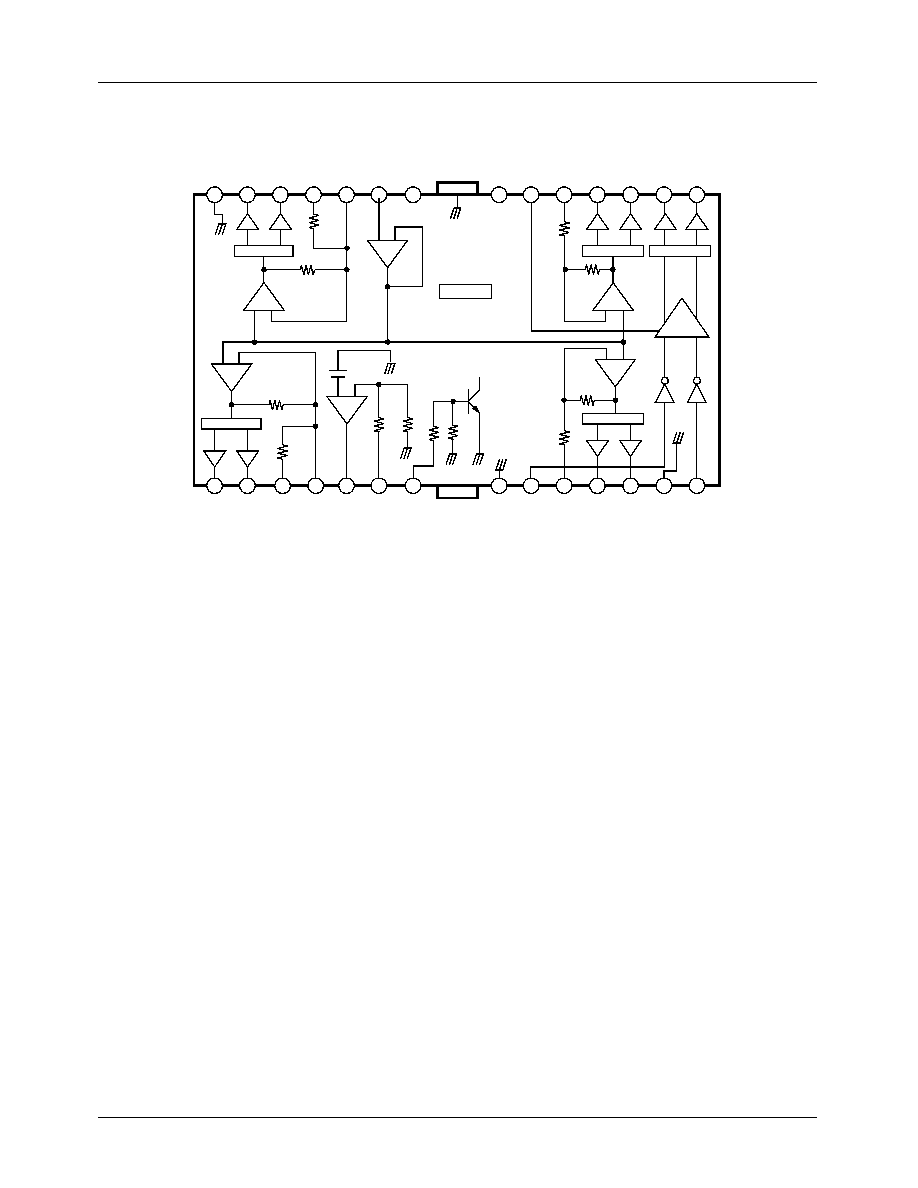
Internal Block Diagram
+
-
Level
shift
Regulator
Mute
-
+
10k
10k
50k
10k
50
k
+
-
10k
+
-
+
-
+
-
+
-
1
2
3
4
5
6
8
9
10
11
12
13
15
16
17
18
19
20
21
22
23
24
25
26
27
28
10k
TSD
+
-
Level
shift
Level
shift
Level
shift
10k
10k
10k
10k
10k
-
-
+
+
7
14
DO1.
1
DO1.
2
DI
1.
1
DI
1.
2
REB
REO
MUTE
GND1
DI
5.
1
DI
2
DO2.
1
DO2.
2
GND2
DI
5.
2
GND3
DO4
.
2
DO4
.
1
DI
4.
2
DI
4.
1
VR
E
F
LD
C
T
L
DI
3
DO3
.
2
DO3
.
1
DO5
.
2
DO5
.
1
+
-
+
-
COMP
Level
shift
V
CC2
FIN
(GND)
V
CC1
FIN
(GND)
2.5V
KA9259D(KA9259ED)
5
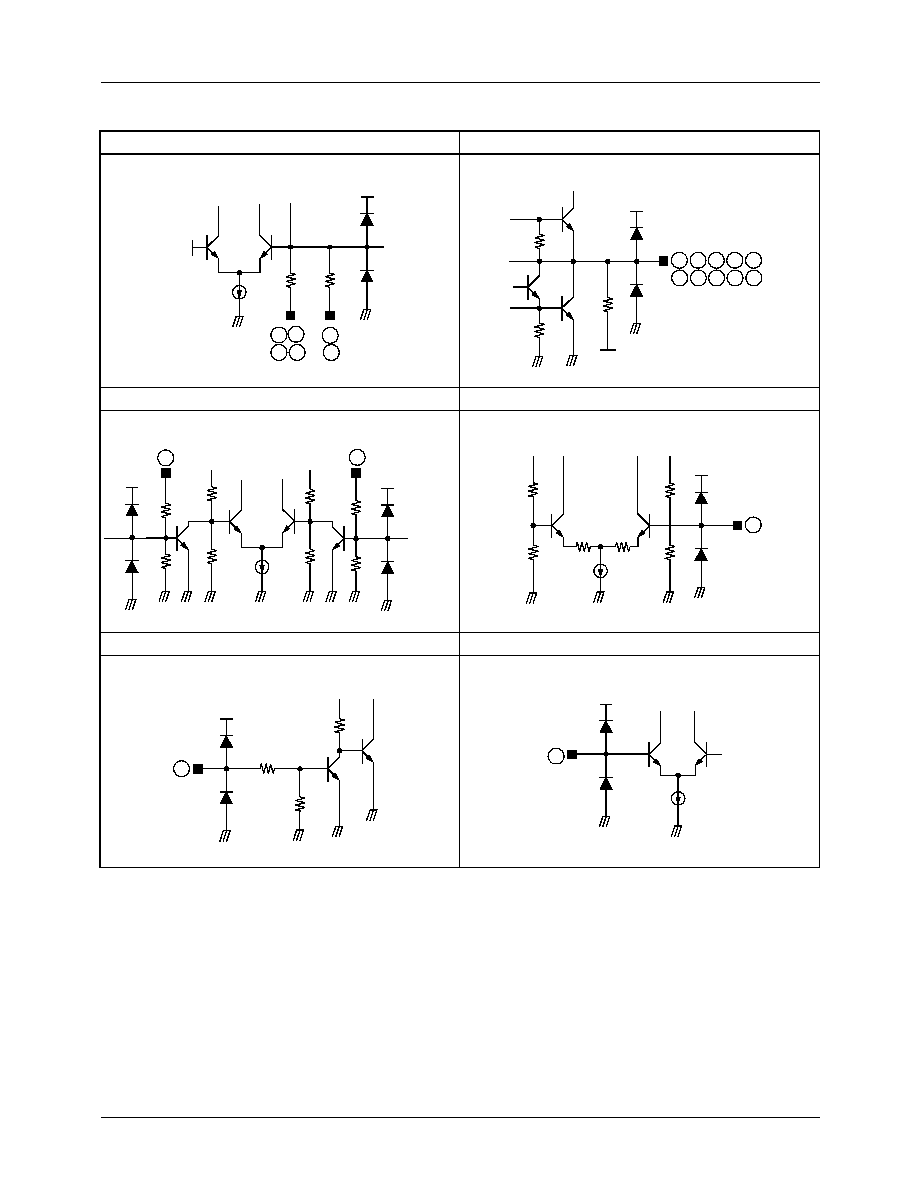
Equivalent Circuits
Driver Input (Except For Loading Motor Driver)
Driver Output
Loading Motor Driver Input
Loading Motor Speed Control Input
Mute Input
Bias Input
4
10
24
19
3
25
2.5V
10k
1
16
2
17
11
18
12
27
15
26
V
REF1
10k
20k
0.58k
9
14
50k
50k
50k
50k
50k
50k
50k
50k
20
50k
50k
50k
50k
50k
50k
7
50k
50k
50k
23
KA9259D(KA9259ED)
6
Absolute Maximum Ratings (Ta = 25
°
C)
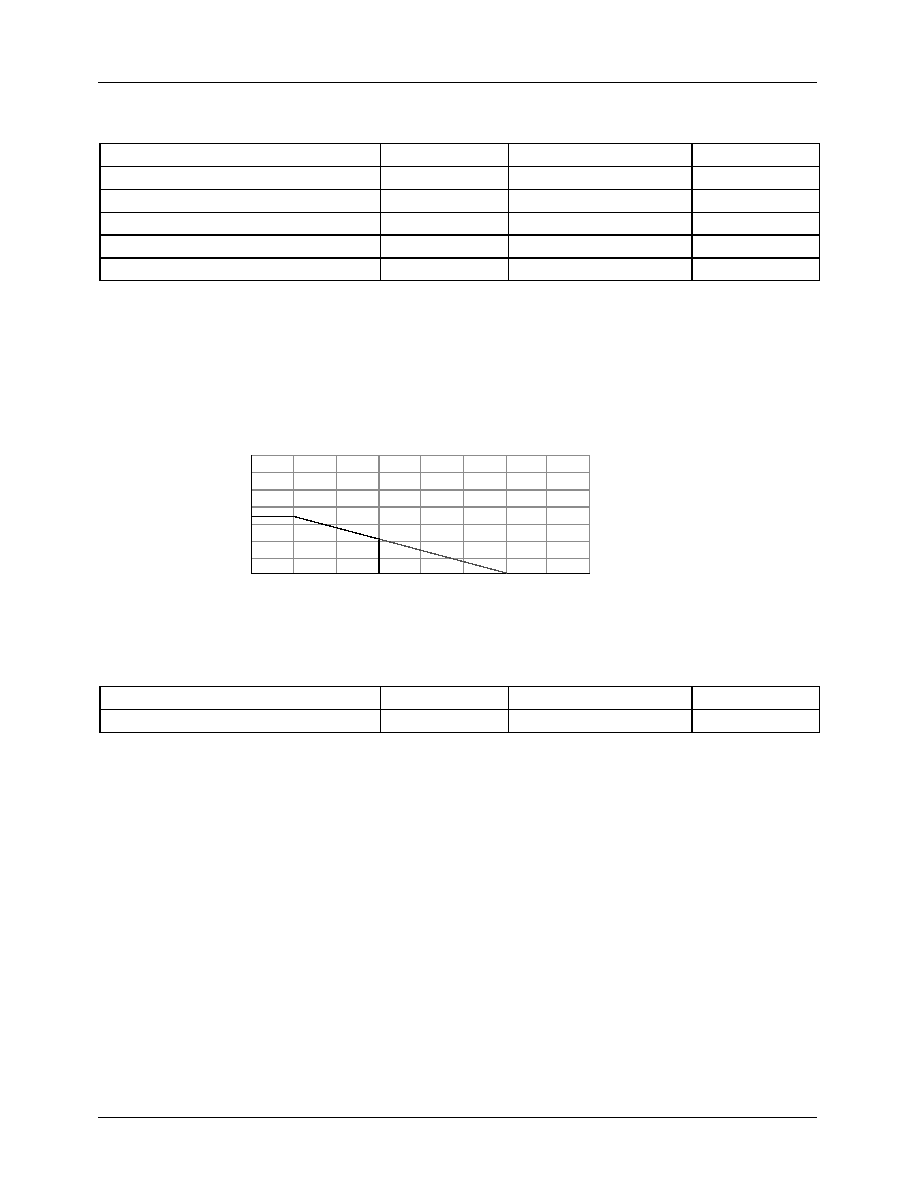
Note:
1. When mounted on 76mm
×
114mm
×
1.57mm PCB (Phenolic resin material).
2. Power dissipation reduces 13.6mW /
°
C for using above Ta=25
°
C
3. Do not exceed Pd and SOA.
Power Dissipation Curve
Recommended Operating Condition (Ta = 25
°
C)
Parameter
Symbol
Value
Unit
Maximum Supply Voltage
V
CC MAX
18
V
Power Dissipation
P
D
1.7
note
W
Operating Temperature
T
OPR
-25 ~ +75
°
C
Storage Temperature
T
STG
-55 ~ +150
°
C
Maximum Current Output
I
OMAX
1
A
Parameter
Symbol
Value
Unit
Operating Supply Voltage
V
CC
6 ~ 13.2
V
3,000
2,000
1,000
0
0
25
50
75
100
125
150
175
Pd (mW)
Ambient temperature, Ta [
°
C]
KA9259D(KA9259ED)
7
Electrical Characteristics
(Ta = 25
°
C, V
CC
= 8V, R
L
= 8
, f =1kHz, unless otherwise specified)
* Guaranteed design value
Parameter
Symbol
Conditions
Min.
Typ.
Max.
Unit
Quiescent Circuit Current
I
CCQ
Under no-load
2.5
6
10
mA
Mute-on Current
I
MUTE
Pin 7=GND
-
2.5
5
mA
Mute-on Voltage
V
MON
-
-
-
0.5
V
Mute-off Voltage
V
MOFF
-
2
-
-
V
REGULATOR PART
Output Voltage
V
REG
I
L
=100mA
4.7
5.0
5.3
V
Load Regulation
V
RL3
I
L
=0
200mA
-50
0
50
mV
Line Regulation
V
CC
V
CC
=6
13V, I
L
=100mA
-20
0
80
mV
DRIVER PART (EXCEPT FOR LOADING MOTOR DRIVER)
Input Offset Voltage
V
IO
-
-15
-
15
mV
Output Offset Voltage 1
V
OO1
-
-40
-
40
mV
Maximum Source Current 1
I
SOURCE1
R
L
=8
V
CC
0.25
0.4
-
A
Maximum Sink Current 1
I
SINK1
R
L
=8
GND
0.25
0.4
-
A
Maximum Output Voltage 3
V
OM3
V
IN
=0.7V, V
CC
=13V
2.5
3.3
4.6
V
Maximum Output Voltage 4
V
OM4
V
IN
=7V, V
CC
=13V, V
IN
=8V
-
-5.8
-5.0
V
Closed-Loop Voltage Gain
A
VF
V
IN
=8V
,
V
CC
=13V
5
6.5
8
dB
*Ripple Rejection Ratio
RR
V
IN
=0.1V
RMS
, f=120Hz
40
60
-
dB
*Slew Rate
SR
120Hz, V
IN
=1V
RMS
,
Square wave
1
2
-
V/
µ
s
LOADING MOTOR DRIVER PART (UNLESS OTHERWISE SPECIFIED, VCTL=OPENED)
Output Voltage 1
V
O1
V
PIN9
=5V, V
PIN14
=0V, R
L
=45
2.5
3.1
3.8
V
Output Voltage 2
V
O2
V
PIN9
=0V, V
PIN14
=5V, R
L
=45
2.5
3.1
3.8
V
Output Voltage Regulation 1
(CTL)
V
OCTL1
V
CTL
=3.5
4.5V, V
PIN9
=5V
V
PIN14
=0V, R
L
=45
0.5
1.0
1.5
V
Output Voltage Regulation 2
(CTL)
V
OCTL2
V
CTL
=3.5
4.5V, V
PIN9
=0V
V
PIN14
=5V, R
L
=45
0.5
1.0
1.5
V
Load Regulation 1
V
RL1
I
L
=100
400mA, V
PIN9
=5V,
V
PIN14
=0V
-
300
700
mV
Load Regulation 2
V
RL2
I
L
=100
400mA, V
PIN9
=0V,
V
PIN14
=5V
-
300
700
mV
Output Offset Voltage 2
V
OO2
V
PIN9
=5V, V
PIN14
=5V
-40
-
40
mV
Output Offset Voltage 3
V
OO3
V
PIN9
=0V, V
PIN14
=0V
-40
-
40
mV
KA9259D(KA9259ED)
8
Application Information
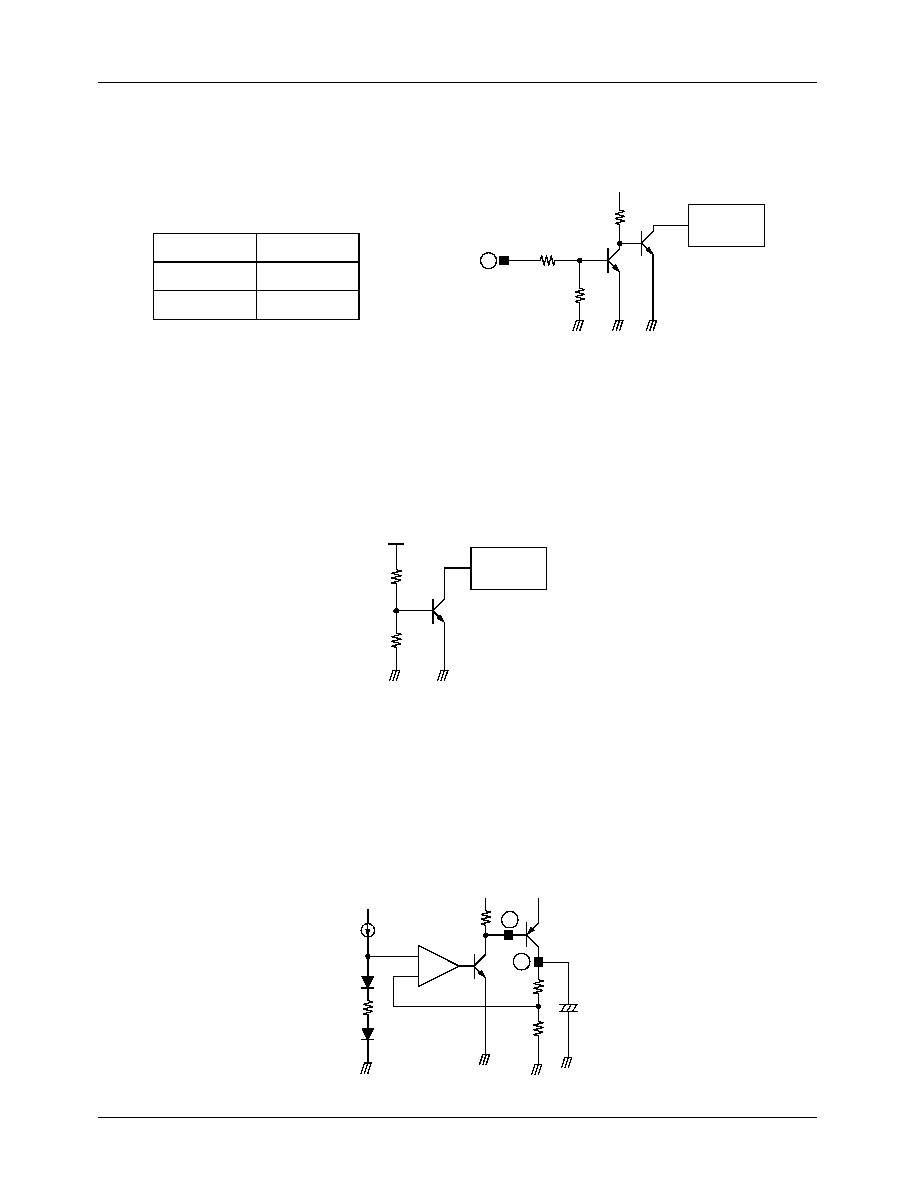
1. Mute
· When the mute pin #7 is open or the voltage of the mute pin #7 is below 0.5V, the mute circuit is activated so that the output
circuit will be muted.
· When the voltage of the mute pin is above 2V, the mute circuit is stopped and the output circuit is operated normally.
· If the chip temperature rises above 175
°
C, then the TSD (Thermal shutdown) circuit is activated and the output circuit is
muted.
2. Tsd (Thermal Shutdown)
· The V
REF BG
is the output voltage of the band-gap-referenced biasing circuit and acts as the input voltage of the TSD
circuit.
· The base-emitter voltage of the TR, Q11 is designed to turn-on at below voltage.
V
BE
= V
REF BG
×
R12 / (R11+R12) = 400mV
· When the chip temperature rises up to 175
°
C, then the turn-on voltage of the Q11 would drop down to 400mV.
Hence, the Q11 would turn on so the output circuit will be muted.
3. Regulator
Pin #7
Mute circuit
High
Turn-off
Low
Turn-on
7
Output driver
bias
V
REF BG
R11
R12
Q11
Output driver
bias
5
6
+
-
I
VREF BG
D1
R1
D2
KSB772
V
OUT
(5V)
CE
100
µ
F
+
R2
R3
KA9259D(KA9259ED)
9
· The V
REF BG
is the output voltage of the band-gap-referenced biasing circuit and is the reference voltage of the regulator.
· The external circuit is composed of the transistor, KSB772 and a capacitor, 100
µ
F, and the capacitor is used as a ripple
eliminator and should have a good temperature characteristics.
· The output voltage, V
OUT
is decided as follows.
V
OUT
= V
REF BG
×
2 = 2.5
×
2 = 5V (R2 = R3)
R2 = R3
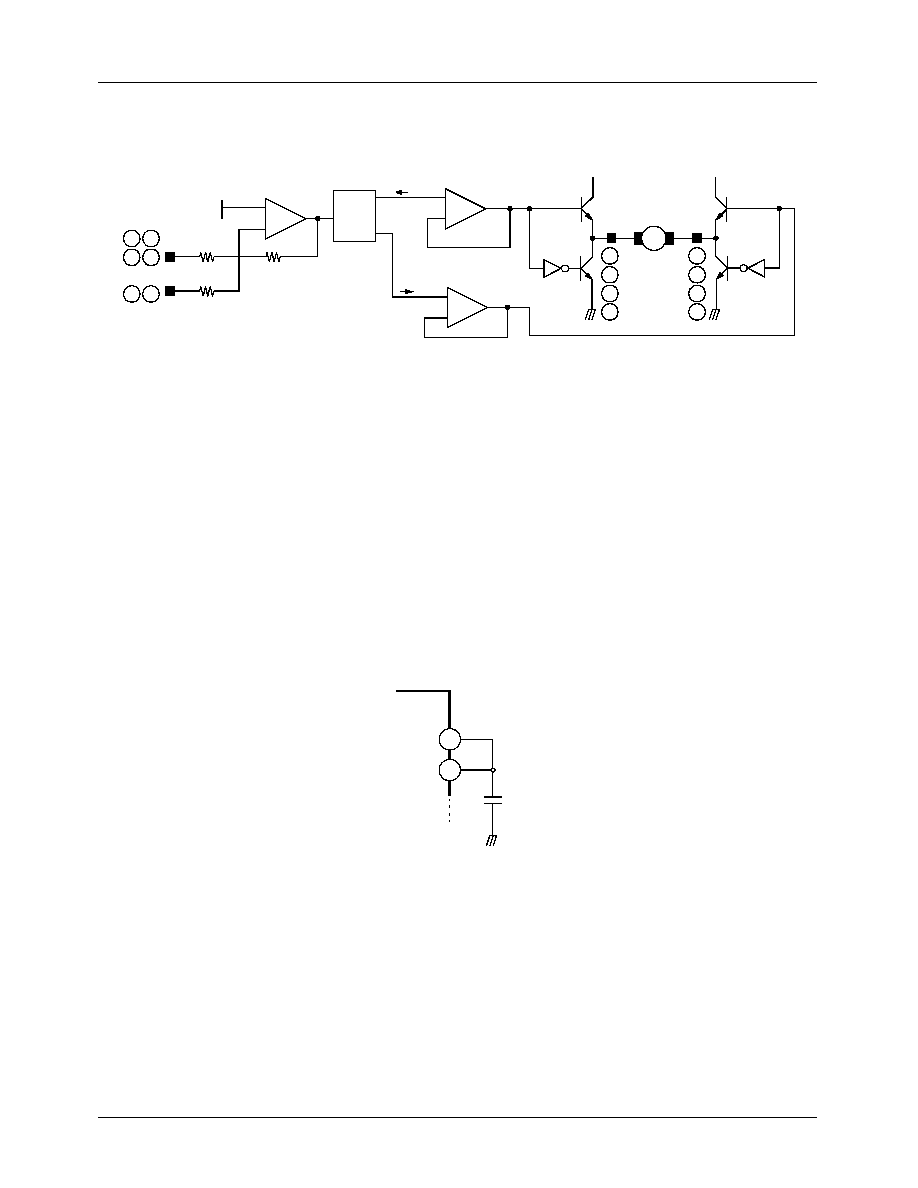
4. Loading Motor Driver
· The input voltages of (5V and 0V) or (0V and 5V) pairs are applied to the input pin #9 and #14 respectively.
· When the input voltages are applied to the input pin #9 and #14, then the output of the comparator is decided depends on the
input voltage status.
· As shown in the above diagram, the difference
V, [V
REF1
+ (I
×
R)] - [V
REF1
-(I
×
R)], is applied to the both terminals of
the motor. The direction of the motor is decided by the voltage difference, +
V and
-
V.
· The output characteristics is as follows,
- If pin # 9=5V and #14=0V, then pin # 15=+
V and #16=
-
V, hence the motor turn in forward direction.
- If pin # 9=0V and #14=5V, then pin # 15=
-
V and #16=+
V, hence the motor turn in reverse direction.
- If pin # 9=5V and #14=5V, then
V=0V, hence the motor stop.
- If pin # 9=0V and #14=0V, then
V=0V, hence the motor stop.
· When the rotation speed control of the loading motor is desired, refer to the follows.
5. Loading Motor Speed Control
· If the torque of the loading motor is too low when it is used with the pin #20 open, then it should used as the above diagram.
· The desired torque could be obtained by selecting the appropriate resistor R as shown in the left diagram.
· If it is necessary, the zener diode can be used as in the right diagram.
· The maximum torque is obtained when the applied voltage at pin #20 is about 6.8V (at V
CC
=8V).
+
-
+
-
Buffer
Buffer
Q1
Q3
M
Q2
Q4
-
V
+
V
9
15
+
-
14
20
16
+
V
-
V
V
REF1
COMP
R
I
I
R
V
REF1
20
20
V
CC
(8V)
4V
50k
R
V
CC
D
V
CC
R
50k
50k
50k
4V
V
CC
(8V)
KA9259D(KA9259ED)
10
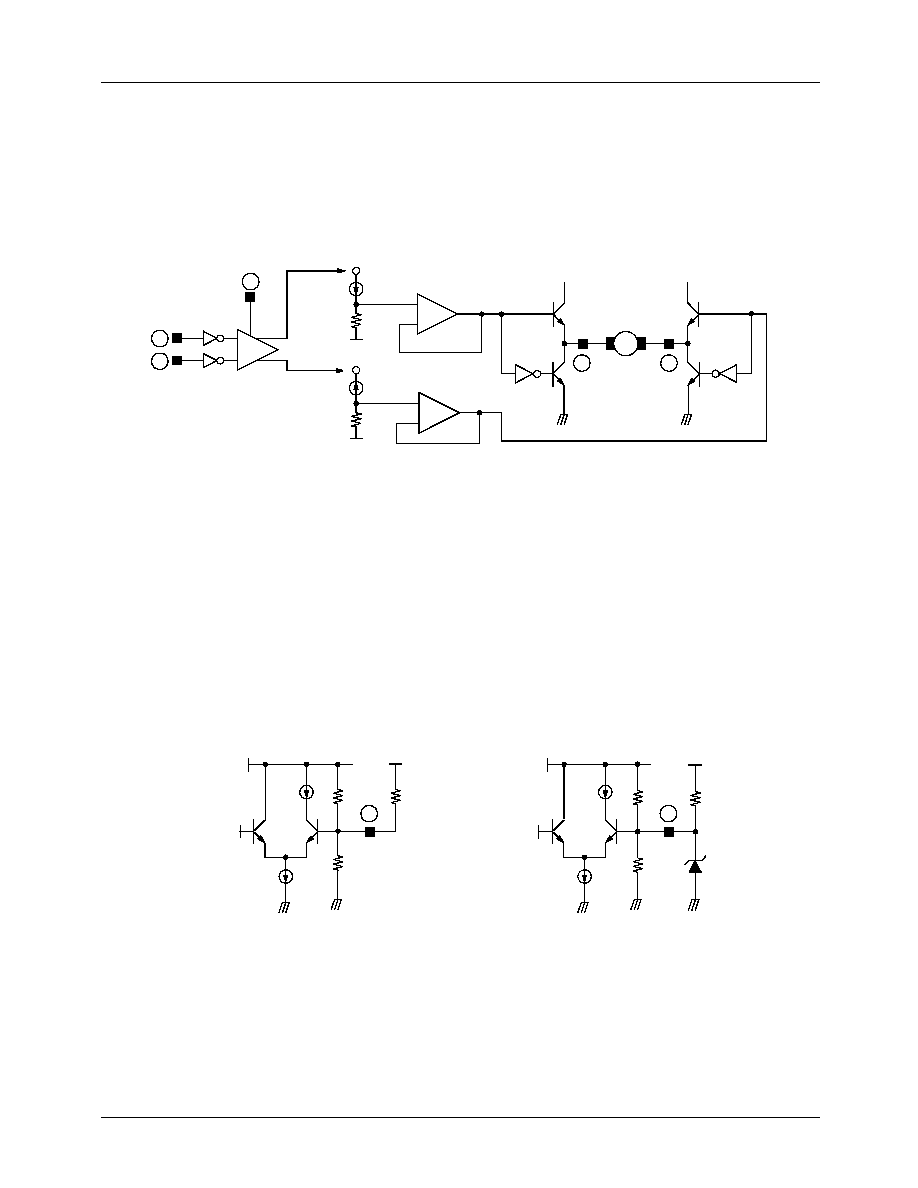
6. Driver (Except For Loading Motor Driver)
· The voltage, V
REF
, is the reference voltage given by the bias voltage of the pin #23.
· The input signal through the pin #3 is amplified by 10k/10k times and then fed to the level shift.
· The level shift produces the current due to the difference between the input signal and the arbitrary reference signal. The
current produced as +
I and
-
I is fed into the driver buffer.
· Driver Buffer operates the power Transistor of the output stage according to the state of the input signal.
· The output stage is the BTL Driver and the motor is rotating in forward direction by operating TR Q1 and TR Q4. On the
other hand, if TR Q2 and TR Q3 is operating, the motor is rotating in reverse direction.
· When the input voltage through the pin #3 is below the V
REF
, then the direction of the motor in forward direction.
· When the input voltage through the pin #3 is above the V
REF
, then the direction of the motor in reverse direction.
· If it is desired to change the gain, then the pin #4 or #24 can be used.
When the bias voltage of the pin #23 is below 1.4V, then the output circuit is muted.
Hence for the normal operation, the bias voltage should be used in 1.6V~6.5V.
7. Connect a by-pass capacitor, 0.1
µ
f between the supply voltage source.
1. Radiation fin is connecting to the internal GND of the package.
2. Connect the fin to the external GND.
+
-
+
-
+
-
10k
100k
VREF
(2.5V)
10k
AMP
Level
shift
-
I
+
I
Buffer
Buffer
Q1
Q3
M
Q2
Q4
-
V
+
V
25
19
10
3
24
4
11
1
17
27
12
2
18
26
22
21
104
V
CC2
V
CC1
KA9259D(KA9259ED)
11
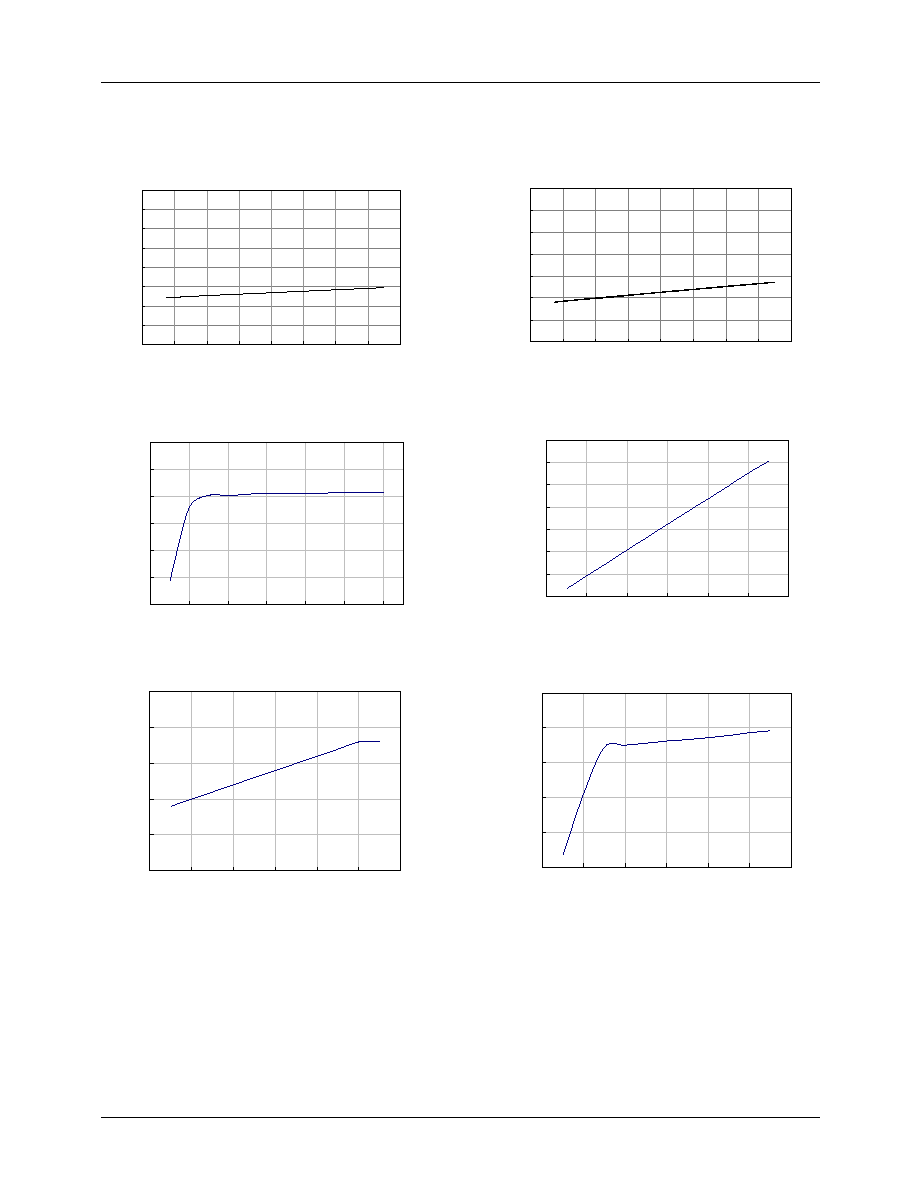
Typical Perfomance Charateristics
300
400
500
600
700
800
900
1000
4
6
8
10
12
14
16
5.0
5.5
6.0
6.5
7.0
7.5
4
6
8
10
12
14
16
Vcc[V]
Vcc[V]
Av
f
[
m
A]
Is
ink
[
m
A
]
Vcc=vari
pin23=2.5
RL=8
Vcc=vari
pin23=2.5
RL=8
Im
ut
e[m
A
]
0
1
2
3
4
5
6
7
4
6
8
10
12
14
16
18
20
Imute
[
mA
]
Vcc[V]
Vcc=vari
2.0
2.5
3.0
3.5
4.0
4.5
4
6
8
10
12
14
16
V
o
m[mA
]
Vcc[V]
Vcc=vari
pin23=2.5
0
2
4
6
8
10
12
14
16
4
6
8
10
12
14
16
18
20
Ic
c
[
mA]
Vcc[v]
Vcc=vari
pin23=2.5
Figure 2. V
CC
vs. Imute
Figure 1. V
CC
vs. I
CC
Figure 4. V
CC
vs. I
Sink
Figure 5. V
CC
vs. Avf
Figure 6. V
CC
vs. Vom
3.0
3.5
4.0
4.5
5.0
5.5
6.0
3
5
7
9
11
13
15
Vcc[V]
V
r
eg[
V]
Vcc=vari
pin23=2.5
RL=8
Figure 3. V
CC
vs. Vreg
KA9259D(KA9259ED)
12
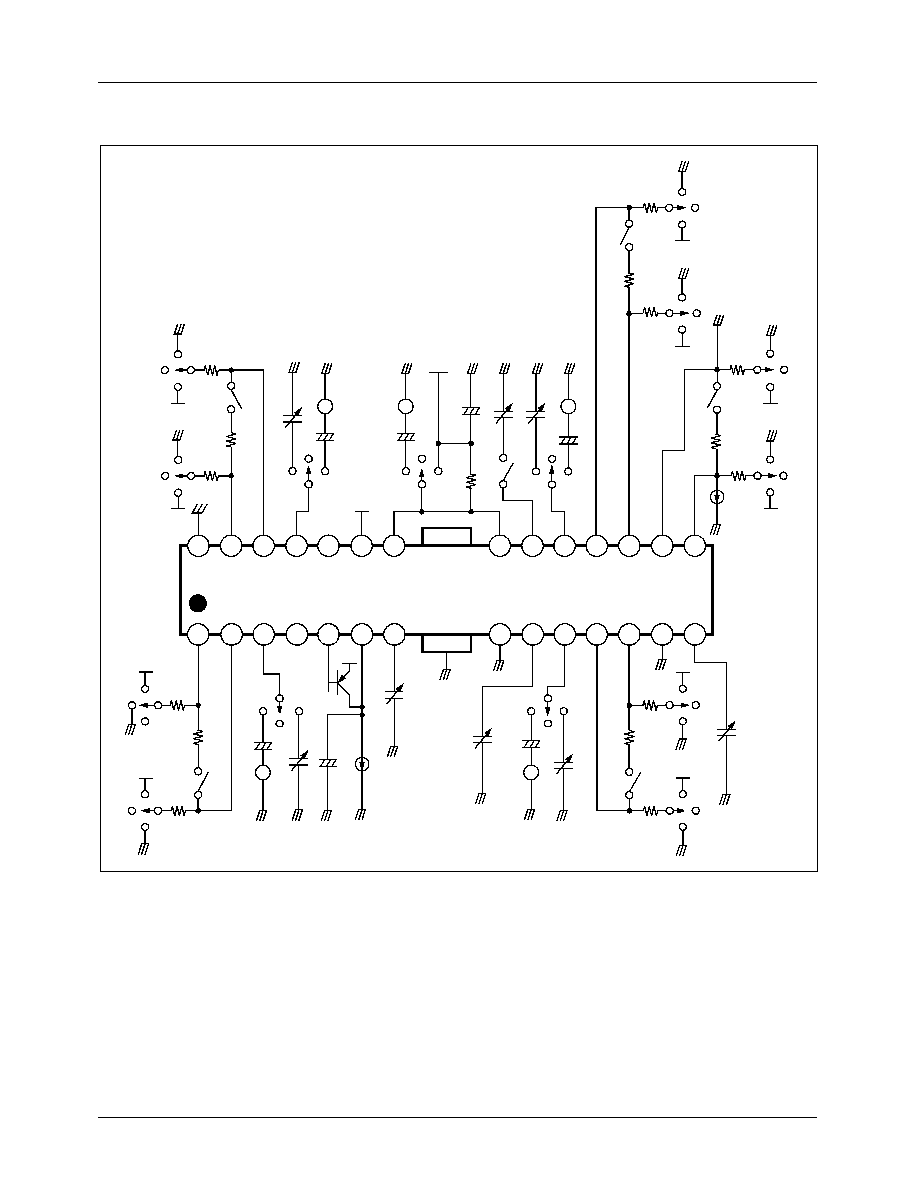
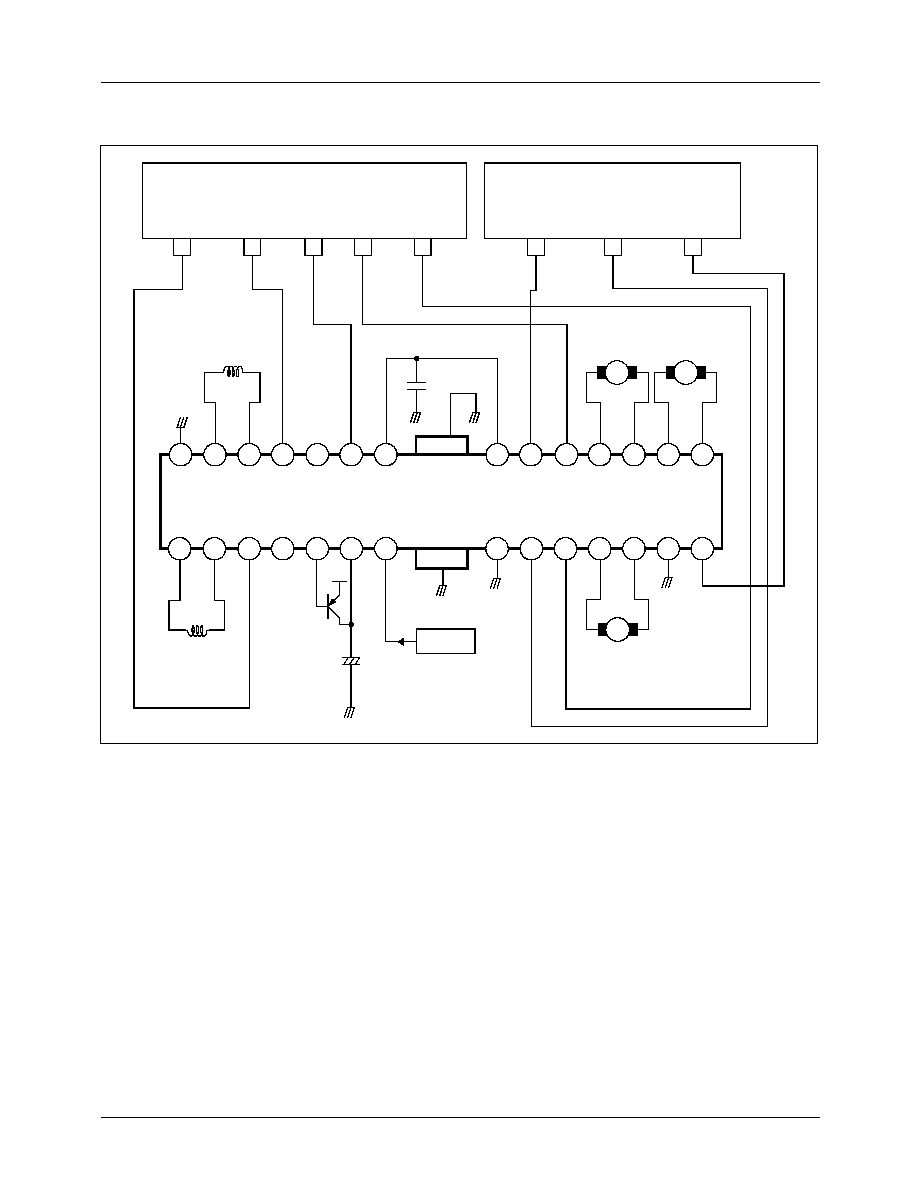
Test Circuits
3
2
1
VCC
SW20
8
SW19
SW21
TRACKING
Ripple
10
µ
F
SW18
2.5V
SW17
20
100
µ
F
VCC
8
8
~
1
2
3
1
2
3
1
2
3
+
+
+
~
~
VCC
CTL
SLED
SW16
SW15
1
2
3
10
µ
F
SW13
3
2
1
SW12
SW14
IL
SW9
SW10
SW11
8
8
45
VCC
VCC
1
8
VCC
8
8
1
2
3
1
2
3
2
3
VCC
8
8
8
1
2
3
VCC
3
2
1
VCC
3
2
1
~
~
8
8
8
VCC
VCC
1
2
3
VCC
1
2
3
1
2
3
+
+
100
µ
F
+
SW7
SW6
SW8
Loading
reverse
Spindle
Loading
forwaed
Mute
KSB772
Focus
SW5
SW4
SW3
SW2
SW1
IL
4
5
3
2
1
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
KA9259D
+
DO1.1 DO1.2 DI1.1 DI1.2 REB
REO
MUTE
GND
DI5.1 DI2
DO2.1 DO2.2 GND2 DI5.2
DO5.1
DO5.2
DO3.1
DO3.2
DI3
LD ctl
VCC1
VCC2
VREF
DI4.1
DI4.2
DO4.1
GND3 DO4.2
KA9259D(KA9259ED)
13
Application Circuits
SERVO PRE-AMP
FOUCS
TRACKING
BIAS
SLED
SPINDLE
CONTROLLER
CONTROL
FORWARD
REVERSE
TRACKING
ACTUATOR
VCC
102
SLED
MOTOR
LOADING
MOTOR
SPINDLE
MOTOR
FOCUS
ACTUATOR
MUTE
Low: ON
High: OFF
100
µ
F
+
5V
out
KSB772
VCC
KA9259D
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
M
M
M
DO1.1 DO1.2 DI1.1 DI1.2 REB
REO
MUTE
GND
DI5.1
DI2
DO2.1 DO2.2 GND2 DI5.2
DO5.1
DO5.2
DO3.1
DO3.2
DI3
LD ctl
VCC1
VCC2
VREF
DI4.1
DI4.2
DO4.1
GND3 DO4.2
KA9259D(KA9259ED)
14
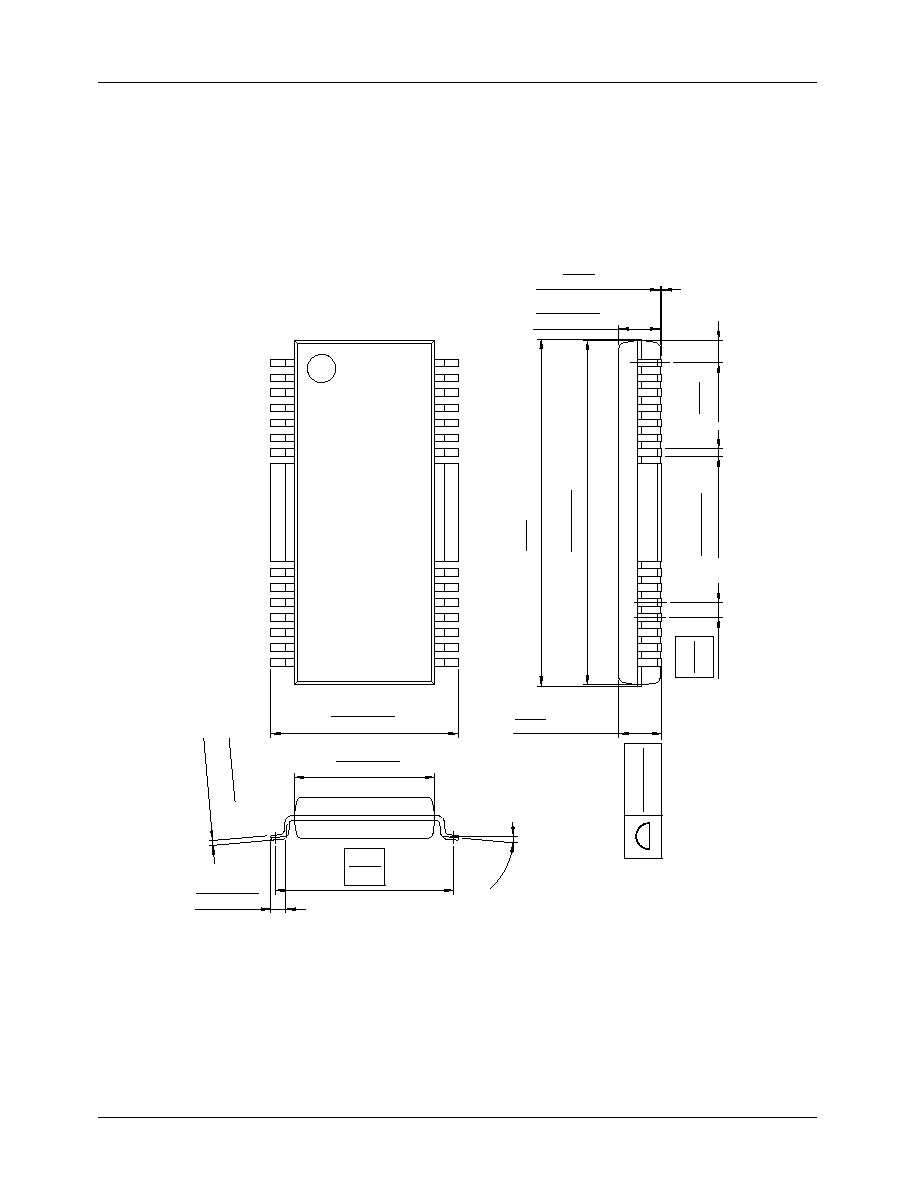
Mechanical Dimensions
Package
#1
#14
#15
#28
0.80
±
0.20
0.031
±
0.008
18.40
±
0.20
0.724
±
0.008
0.40
±
0.10
0.016
±
0.004
0.80
0.031
9.53
0.375
2.20
±
0.20
0.087
±
0.008
0.05
0.002
10.00
±
0.30
0.394
±
0.012
7.50
±
0.20
0.295
±
0.008
18.80
0.740
0~8
°
1.20
0.047
()
2.50
0.098
MAX0.10
MAX0.004
MAX
MAX
MIN
+
0.10
-0.05
0.25
+
0.004
-0.002
0.010
28-SSOPH-375

KA9259D(KA9259ED)
15
KA9259D(KA9259ED)
9/13/02 0.0m 001
Stock#DSxxxxxxxx
2002 Fairchild Semiconductor Corporation
LIFE SUPPORT POLICY
FAIRCHILD'S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES
OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR
CORPORATION. As used herein:
1. Life support devices or systems are devices or systems
which, (a) are intended for surgical implant into the body,
or (b) support or sustain life, and (c) whose failure to
perform when properly used in accordance with
instructions for use provided in the labeling, can be
reasonably expected to result in a significant injury of the
user.
2. A critical component in any component of a life support
device or system whose failure to perform can be
reasonably expected to cause the failure of the life support
device or system, or to affect its safety or effectiveness.
www.fairchildsemi.com
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHT TO MAKE CHANGES WITHOUT FURTHER NOTICE TO ANY
PRODUCTS HEREIN TO IMPROVE RELIABILITY, FUNCTION OR DESIGN. FAIRCHILD DOES NOT ASSUME ANY
LIABILITY ARISING OUT OF THE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN; NEITHER
DOES IT CONVEY ANY LICENSE UNDER ITS PATENT RIGHTS, NOR THE RIGHTS OF OTHERS.